avant l’avènement des circuits logiques à semi-conducteurs, les systèmes de contrôle logique étaient conçus et construits exclusivement autour de relais électromécaniques. Les relais sont loin d’être obsolètes dans la conception moderne, mais ont été remplacés dans bon nombre de leurs anciens rôles en tant que dispositifs de contrôle au niveau logique, relégués le plus souvent dans les applications exigeant une commutation à courant élevé et/ou à haute tension.,
les systèmes et processus nécessitant un contrôle « Marche/Arrêt” abondent dans le commerce et l’industrie modernes, mais de tels systèmes de contrôle sont rarement construits à partir de relais électromécaniques ou de portes logiques discrètes. Au lieu de cela, les ordinateurs numériques remplissent le besoin, qui peut être programmé pour faire une variété de fonctions logiques.
L’histoire des contrôleurs logiques programmables
à la fin des années 1960, une société américaine nommée Bedford Associates a sorti un dispositif informatique qu’ils ont appelé le MODICON., En tant qu’acronyme, il signifiait contrôleur numérique modulaire, et est devenu plus tard le nom d’une division de l’entreprise consacrée à la conception, la fabrication et la vente de ces ordinateurs de contrôle spéciaux.
D’autres firmes d’ingénierie ont développé leurs propres versions de cet appareil, et il a finalement été connu en termes non exclusifs comme un PLC, ou contrôleur logique Programmable., Le but d’un PLC était de remplacer directement les relais électromécaniques en tant qu’éléments logiques, en substituant à la place un ordinateur numérique à semi-conducteurs avec un programme stocké, capable d’émuler l’interconnexion de nombreux relais pour effectuer certaines tâches logiques.
logique D’échelle et automates de programmation
un automate possède de nombreuses bornes « d’entrée”, à travers lesquelles il interprète les états logiques « haut” et « bas” des capteurs et des commutateurs., Il dispose également de nombreuses bornes de sortie, à travers lesquelles il émet des signaux « élevés” et « faibles” pour alimenter les lumières, les solénoïdes, les contacteurs, les petits moteurs et d’autres appareils se prêtant au contrôle Marche/Arrêt.
dans un effort pour rendre les automates faciles à programmer, leur langage de programmation a été conçu pour ressembler à des diagrammes logiques d’échelle. Ainsi, un électricien industriel ou un ingénieur électricien habitué à lire des schémas logiques d’échelle se sentirait à l’aise de programmer un automate pour effectuer les mêmes fonctions de contrôle.,
Les automates sont des ordinateurs industriels et, en tant que tels, leurs signaux d’entrée et de sortie sont généralement de 120 volts CA, tout comme les relais de commande électromécaniques qu’ils ont été conçus pour remplacer. Bien que certains automates aient la capacité d’entrer et de produire des signaux de tension continue de bas niveau de l’ampleur utilisée dans les circuits de porte logique, c’est l’exception et non la règle. Les normes de connexion et de programmation des signaux varient quelque peu entre les différents modèles D’automates, mais elles sont suffisamment similaires pour permettre une introduction « générique” à la programmation D’automates ici.,
l’illustration suivante montre un automate simple, tel qu’il peut apparaître en vue de face. Deux bornes à vis fournissent une connexion à 120 volts CA pour alimenter les circuits internes de L’automate, étiquetés L1 et L2. Six bornes à vis sur le côté gauche permettent la connexion aux périphériques d’entrée, chaque borne représentant un « canal” d’entrée différent avec sa propre étiquette « X”.
la borne à vis inférieure gauche est une connexion « commune”, qui est généralement connectée à L2 (neutre) de la source d’alimentation 120 VCA.,

à l’intérieur du boîtier de L’automate, connecté entre chaque borne d’entrée et la borne commune, se trouve un dispositif opto-isolateur (Diode électroluminescente) qui fournit un signal logique « élevé” isolé électriquement aux circuits de l’ordinateur (un photo-transistor interprète la lumière de la LED) lorsqu’une puissance de 120 VAC est appliquée entre la borne d’entrée respective et la borne commune., Une LED d’indication sur le panneau avant de L’automate donne une indication visuelle d’une entrée « sous tension »:

les signaux de sortie sont générés par les circuits informatiques de l’automate activant un dispositif de commutation (transistor, TRIAC, ou même un relais électromécanique), connectant la borne” Source « à La borne” Source », en conséquence, est généralement connectée au côté L1 de la source d’alimentation 120 VAC., Comme pour chaque entrée, une LED d’indication sur le panneau avant de L’automate donne une indication visuelle d’une sortie « sous tension »:

de cette façon, L’automate peut s’interfacer avec des dispositifs réels tels que des commutateurs et des solénoïdes. La logique réelle du système de contrôle est établie à l’intérieur de L’automate au moyen d’un programme informatique. Ce programme dicte quelle sortie est sous tension dans quelles conditions d’entrée.,
bien que le programme lui-même semble être un schéma logique en échelle, avec des symboles de commutateur et de relais, il n’y a pas de contacts de commutateur ou de bobines de relais réels fonctionnant à l’intérieur de L’automate pour créer les relations logiques entre l’entrée et la sortie. Ce sont des contacts et des bobines imaginaires, si vous voulez. Le programme est entré et visualisé via un ordinateur personnel connecté au port de programmation de L’automate. Considérez le circuit et le programme PLC suivants:
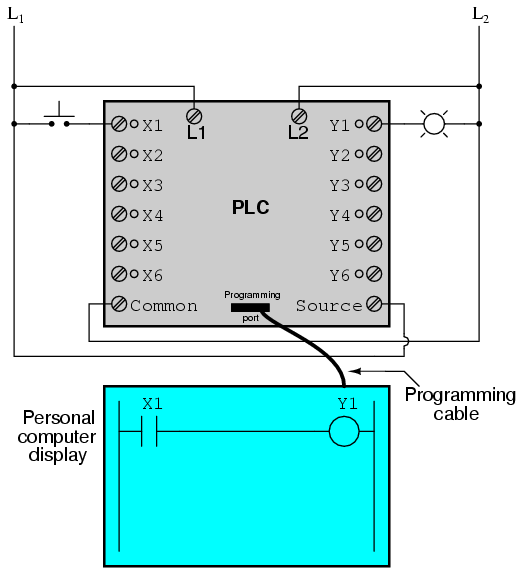
lorsque le bouton-poussoir n’est pas activé (non pressé), aucune alimentation N’est envoyée à L’entrée X1 de L’API., Suivant le programme, qui montre un contact X1 normalement ouvert en série avec une bobine Y1, aucune « puissance” ne sera envoyée à la bobine Y1. Ainsi, la sortie Y1 de L’automate reste désactivée et le voyant qui y est connecté reste sombre.
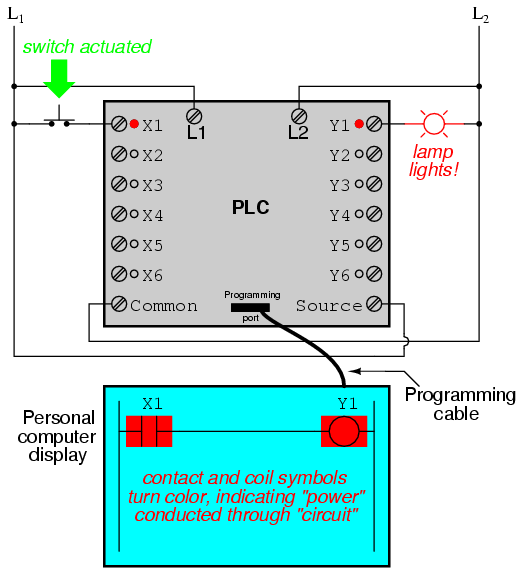
si le bouton-poussoir est enfoncé, cependant, l’alimentation sera envoyée à L’entrée X1 de L’automate. Tous les contacts X1 apparaissant dans le programme prendront l’état actionné (non normal), comme s’il s’agissait de contacts de relais actionnés par la mise sous tension d’une bobine de relais nommée « X1”.,
dans ce cas, la mise sous tension de L’entrée X1 entraînera la « fermeture” du contact X1 normalement ouvert, envoyant « power” à la bobine Y1. Lorsque la bobine Y1 du programme « se met sous tension », la sortie Y1 réelle devient sous tension, allumant la lampe qui y est connectée:
Il faut comprendre que le contact X1, la bobine Y1, les fils de connexion et la” puissance » apparaissant sur Ils n’existent pas en tant que véritables composants électriques., Ils existent sous forme de commandes dans un programme informatique—un logiciel uniquement—qui ressemble à un véritable schéma de relais.
Il est tout aussi important de comprendre que l’ordinateur personnel utilisé pour afficher et modifier le programme de L’automate N’est pas nécessaire pour le fonctionnement continu de l’automate. Une fois qu’un programme a été chargé sur L’automate à partir de l’ordinateur personnel, l’ordinateur personnel peut être débranché de L’automate et L’automate continuera à suivre les commandes programmées.,
j’inclus l’affichage de l’ordinateur personnel dans ces illustrations uniquement pour vous aider à comprendre la relation entre les conditions réelles (fermeture du commutateur et état de la lampe) et l’état du programme (« alimentation” via des contacts virtuels et des bobines virtuelles).
Système de Contrôle de Comportement
La vraie puissance et la polyvalence d’un AUTOMATE est révélé lorsque l’on veut modifier le comportement d’un système de contrôle. L’automate étant un dispositif programmable, nous pouvons modifier son comportement en changeant les commandes que nous lui donnons, sans avoir à reconfigurer les composants électriques qui y sont connectés.,
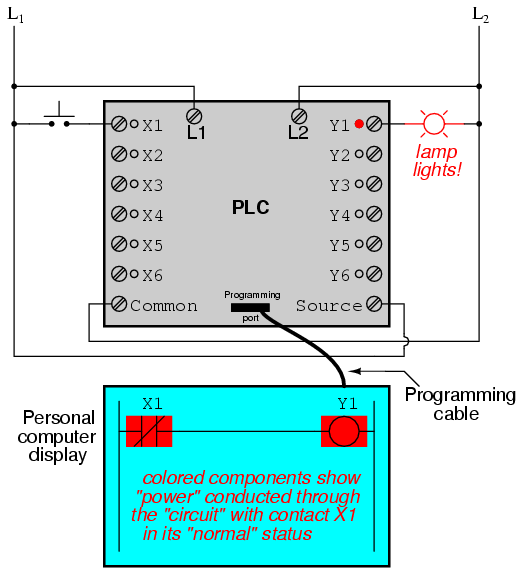
par exemple, supposons que nous voulions faire fonctionner ce circuit interrupteur-lampe de manière inversée: appuyez sur le bouton pour éteindre la lampe et relâchez-le pour l’allumer. La solution « matérielle » exigerait qu’un commutateur à bouton-poussoir normalement fermé soit remplacé par le commutateur normalement ouvert actuellement en place. La solution « logicielle » est beaucoup plus facile: il suffit de modifier le programme pour que le contact X1 soit normalement fermé plutôt que normalement ouvert.,
dans l’illustration suivante, nous avons le système modifié montré dans l’état où le bouton-poussoir n’est pas actionné (pas enfoncé):
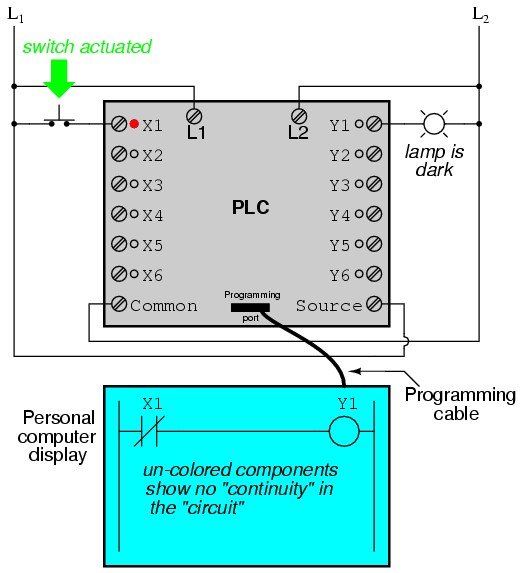
dans cette illustration suivante, le commutateur est montré actionné (enfoncé):
l’un des avantages de la mise en œuvre du contrôle logique dans le logiciel plutôt que dans le matériel est que les signaux d’entrée peuvent être réutilisés autant de fois que nécessaire dans le programme., Par exemple, prenez le circuit et le programme suivants, conçus pour mettre la lampe sous tension si au moins deux des trois interrupteurs à bouton-poussoir sont actionnés simultanément:
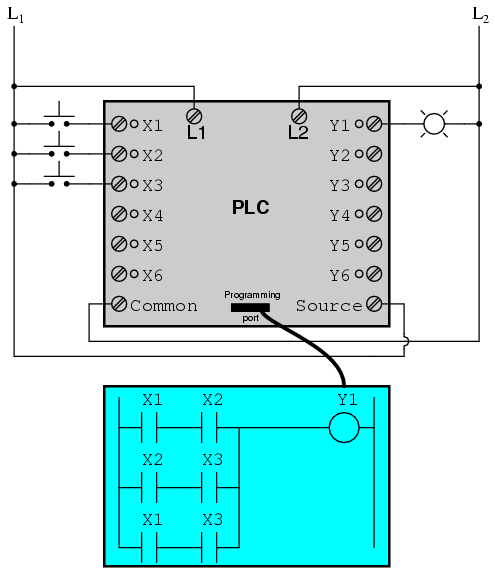
pour construire un circuit équivalent à l’aide de relais électromécaniques, il faudrait utiliser trois relais avec deux contacts normalement ouverts chacun, pour fournir deux contacts par interrupteur d’entrée., En utilisant un automate, cependant, nous pouvons programmer autant de contacts que nous le souhaitons pour chaque entrée « X” sans ajouter de matériel supplémentaire, car chaque entrée et chaque sortie ne sont qu’un seul bit dans la mémoire numérique de L’automate (0 ou 1), et peuvent être rappelées autant de fois que nécessaire.
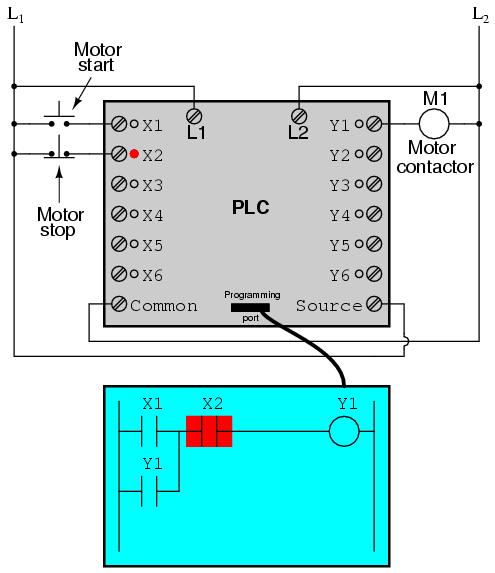
de plus, comme chaque sortie de L’automate N’est rien de plus qu’un bit dans sa mémoire, nous pouvons assigner des contacts dans un programme automate « actionné” par un statut de sortie (Y)., Prenons par exemple ce système suivant, un circuit de commande démarrage-arrêt du moteur:
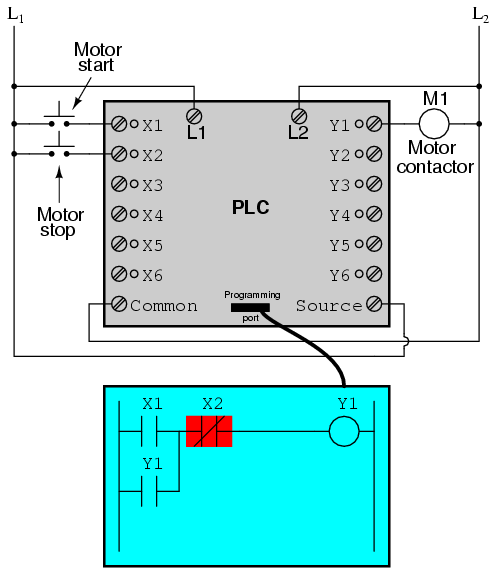
l’interrupteur à bouton-poussoir connecté à l’entrée X1 sert d’interrupteur « Start”, tandis que l’interrupteur connecté à l’entrée X2 sert d’interrupteur « Stop. »Un autre contact du programme, nommé Y1, utilise directement l’état de la bobine de sortie comme contact d’étanchéité, de sorte que le contacteur du moteur continue à être sous tension après le relâchement du bouton-poussoir « Start”. Vous pouvez voir le contact normalement fermé X2 apparaître dans un bloc coloré, montrant qu’il est dans un état fermé (« conducteur électrique”).,
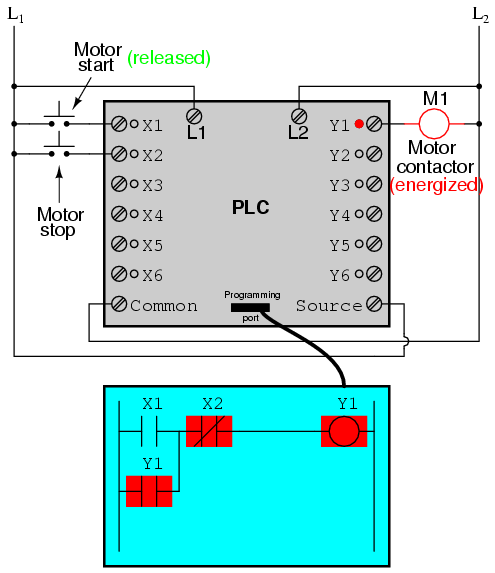
Si nous devions appuyer sur le bouton « Démarrer”, l’entrée X1 s’activerait, « fermant” ainsi le contact X1 dans le programme, envoyant « power” à la « bobine” Y1, alimentant la sortie Y1 et appliquant une alimentation CA de 120 volts à la bobine du contacteur moteur réel.,ally-open X1 « contact” retournera à son état « ouvert”, mais le moteur continuera à fonctionner car le « contact” d’étanchéité Y1 continue de fournir une « continuité” à la bobine « power” Y1, maintenant ainsi la sortie Y1 sous tension:
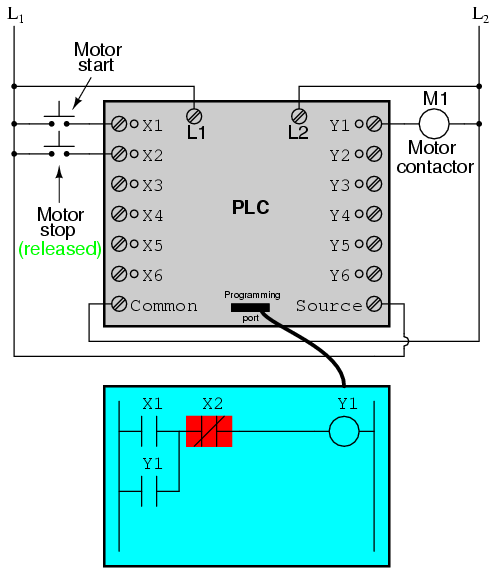
Pour arrêter le moteur, nous devons momentanément appuyer sur le bouton-poussoir « Stop”, qui « Contact” normalement fermé, brisant la continuité de la bobine Y1: «

lorsque le bouton-poussoir”stop »est relâché, l’entrée x2 se met hors tension, ramenant le »contact « x2 à son état normal” fermé »., Cependant, le moteur ne redémarrera pas tant que le bouton-poussoir « Start” ne sera pas actionné, car le « joint d’étanchéité” de Y1 a été perdu:
conception à sécurité intégrée dans les systèmes contrôlés par PLC
un point important à souligner ici est que la conception à sécurité intégrée est tout aussi importante dans les systèmes contrôlés par PLC que dans les systèmes électromécaniques contrôlés par relais. Il faut toujours tenir compte des effets d’un câblage défectueux (ouvert) sur le ou les appareils contrôlés., Dans cet exemple de circuit de commande de moteur, nous avons un problème: si le câblage d’entrée pour X2 (l’interrupteur” Stop ») devait échouer, il n’y aurait aucun moyen d’arrêter le moteur!
la solution à ce problème est une inversion de logique entre le « contact” X2 à l’intérieur du programme PLC et le bouton-poussoir « Stop” réel:
lorsque le bouton-poussoir « Stop” normalement fermé n’est pas activé (Non appuyé), L’entrée X2 de L’automate sera activée, « fermant” ainsi le « contact” X2 à l’intérieur du programme., Cela permet de démarrer le moteur lorsque l’entrée X1 est sous tension et de continuer à fonctionner lorsque le bouton-poussoir « Démarrer” n’est plus enfoncé. Lorsque le bouton-poussoir” Stop « est actionné, l’entrée X2 se met hors tension, ouvrant ainsi le” contact « X2 à l’intérieur du programme PLC et arrêtant le moteur.
donc, nous voyons qu’il n’y a pas de différence opérationnelle entre cette nouvelle conception et la conception précédente. Cependant, si le câblage d’entrée de l’entrée X2 devait échouer, L’entrée X2 se mettrait hors tension de la même manière que lorsque le bouton-poussoir « Stop” est enfoncé., Le résultat, alors, pour une panne de câblage sur L’entrée X2 est que le moteur s’arrêtera immédiatement.
Il s’agit d’une conception plus sûre que celle présentée précédemment, où une défaillance du câblage du commutateur « Stop” aurait entraîné une incapacité à éteindre le moteur. En plus des éléments de programme d’entrée (X) et de sortie (Y), Les automates fournissent des bobines et des contacts « internes” sans connexion intrinsèque au monde extérieur. Ceux-ci sont utilisés de la même manière que les « relais de contrôle” (CR1, CR2, etc.) sont utilisés dans les circuits de relais standard: pour fournir une inversion de signal logique si nécessaire.,
pour démontrer comment l’un de ces relais « internes” pourrait être utilisé, considérons l’exemple de circuit et de programme suivant, conçu pour émuler la fonction d’une porte NAND à trois entrées. Étant donné que les éléments de programme PLC sont généralement conçus par des lettres simples, j’appellerai le relais de contrôle interne » C1 « plutôt que” CR1″comme il serait d’usage dans un circuit de contrôle de relais:
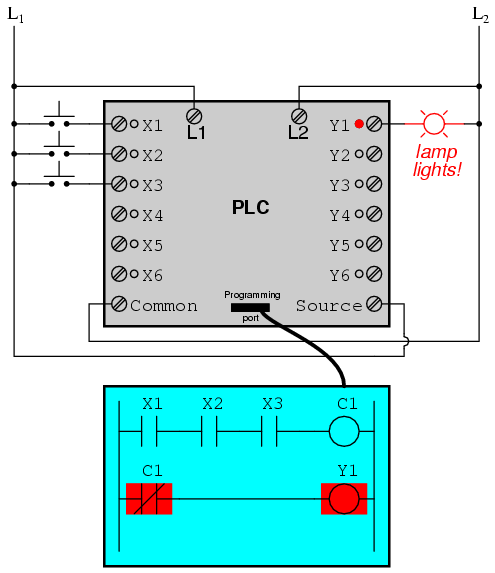
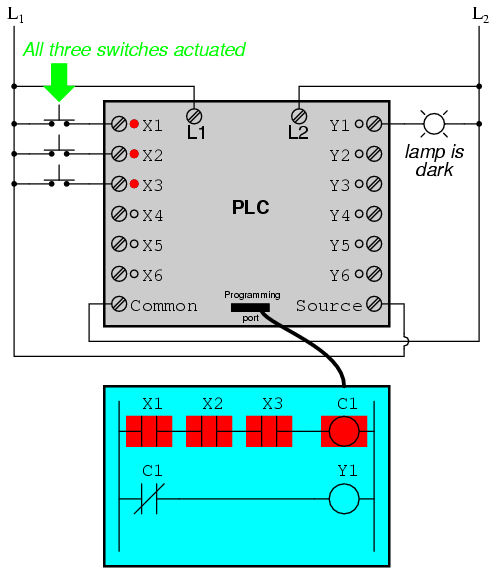
dans ce circuit, la lampe restera allumée tant que l’un des boutons-poussoirs, Pour que la lampe s’éteigne, nous devrons actionner (appuyer) les trois commutateurs, comme ceci:
fonctionnalité PLC Avancée
Cette section sur les contrôleurs logiques programmables illustre juste un petit échantillon de leurs capacités. En tant qu’ordinateurs, les automates peuvent effectuer des fonctions de synchronisation (pour l’équivalent de relais temporisés), le séquençage de tambour et d’autres fonctions avancées avec une précision et une fiabilité bien plus grandes que ce qui est possible en utilisant des dispositifs logiques électromécaniques. La plupart des automates ont la capacité de bien plus de six entrées et six sorties., La photographie suivante montre plusieurs modules d’entrée et de sortie d’un seul automate Allen-Bradley.

Avec chaque module ayant seize « points” d’entrée ou de sortie, cet AUTOMATE a la capacité de surveiller et de contrôler des dizaines d’appareils., Dans une armoire de commande, un automate prend peu de place, surtout compte tenu de l’espace équivalent qui serait nécessaire aux relais électromécaniques pour remplir les mêmes fonctions:

surveillance et Contrôle À Distance des automates Via des réseaux informatiques numériques
un avantage des automates qui ne peuvent tout simplement pas être dupliqués par des relais électromécaniques est la surveillance et le contrôle à distance via des réseaux informatiques numériques. Parce qu’un automate N’est rien de plus qu’un ordinateur numérique à usage spécial, il a la capacité de communiquer avec d’autres ordinateurs assez facilement., La photographie suivante montre un ordinateur personnel affichant une image graphique d’un processus réel au niveau du liquide (une station de pompage, ou « ascenseur”, pour un système municipal de traitement des eaux usées) contrôlé par un PLC.
la station de pompage actuelle est située à des kilomètres de l’écran de l’ordinateur personnel: